Embedded Systems • Computer Vision • Real-time Control • PCB Design
Champaign, IL · 2025 – Present
Designed and validated full embedded stack for 4-DOF robotic arm (STM32/ESP32, ROS2, motor & sensor drivers). Integrated depth camera with NVIDIA Orin to improve mapping & state estimation accuracy.
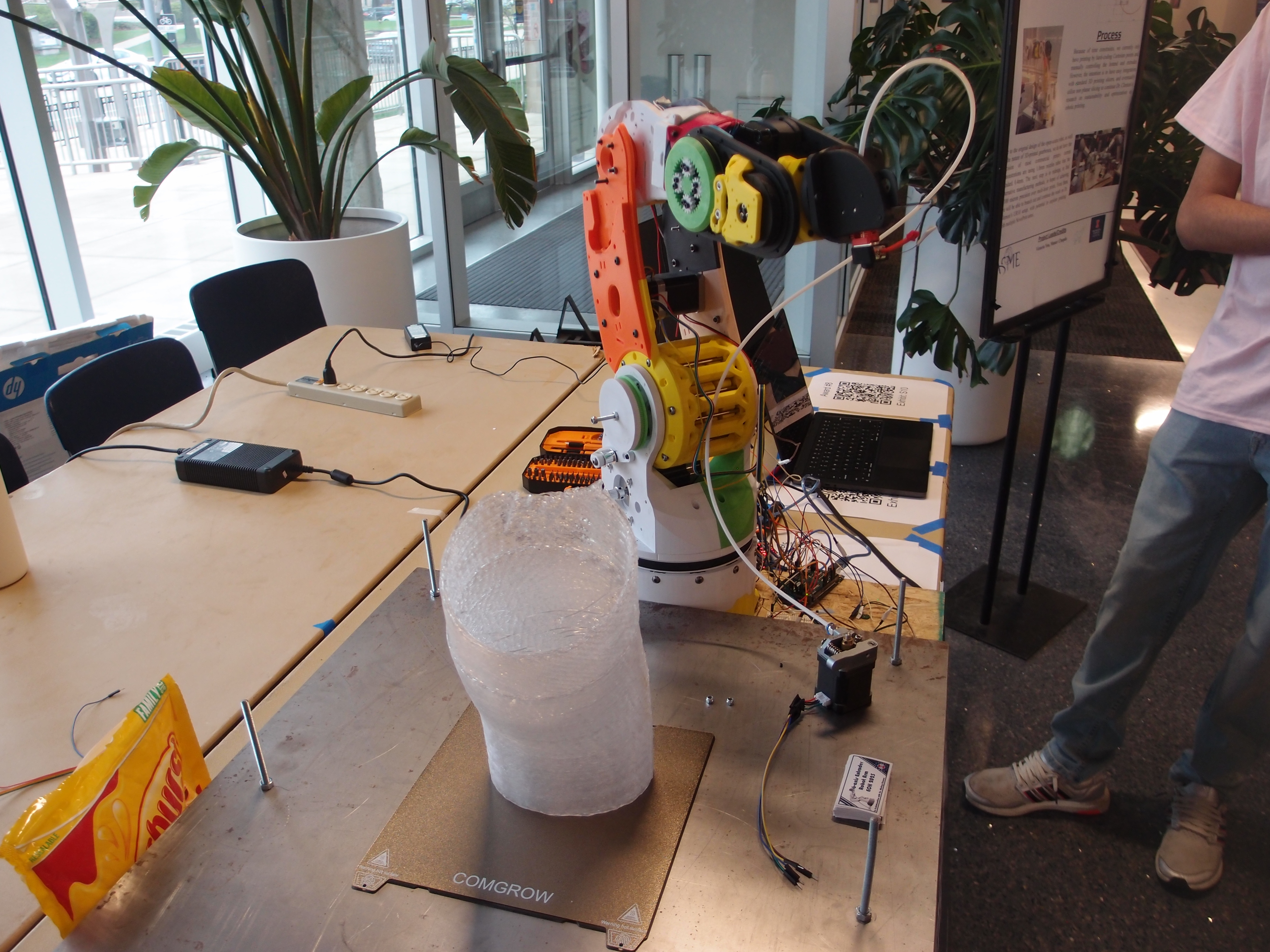
Robotic 3D Printing · 6-DOF Control · CAN
Directed development of a 6-DOF robotic 3D printer with ROS-based multi-axis control. Built custom control boards and synchronized CAN bus networks for accurate toolpath execution.

Custom Flight Controller · SLAM · Computer Vision
Designed custom flight controller PCB from scratch using ESP32, integrating power management, sensor interfaces, and motor control circuitry. Pi handles vision: stereo depth & object detection feeding obstacle avoidance.

